Seyrüsefer
Seyrüsefer, bir gemi ya da bir uçağı
pozisyon, yön, zaman ve mesafe çözümleri ile bir yerden ötekine götürme
işlemidir.
İlk kullanılan seyrüsefer yardımcısı, hem
denizciler hem de havacılar için Kutup Yıldızı olmuştur. Bu gün bile yön ve yer
bulmada kullanılmaktadır. Ufukların ardında yeni toprak, insan ve servet arayan
cesur denizciler ise Kutup Yıldızı yanı sıra yol göstermeleri için yanlarında
kuş taşırlardı.
Denize açıldıktan bir kaç gün sonra bu
kuşlardan birini salarlar, kuş geriye doğru uçarken çıkış noktaları ile
yaptıkları rota arasında, kuşun uçuş yönüne göre düzeltmede bulunurlardı. Daha
sonraki günlerde salınan kuşlar yükseklere çıkıp tekrar geri dönerse bu,
etrafta kara olmadığını gösterirdi. Bu yöntem, kuş ileride bir noktaya doğru
uçana kadar uygulanırdı. İleriye doğru uçan kuş, karanın o yönde ve yakın
olduğunu belirtirdi.
1519'da Macellan dünya turunu tamamladığında,
seyrüsefer yardımcıları çoğalmaya ve gelişmeye başlamıştı. Gemisinde küresel
bir dünya haritası, manyetik pusula, saat ve parakete (geminin 50-100m
arkasından çekilen sürat ölçme aleti) vardı ve o zamanın en gelişmiş seyrüsefer
yardımcıları idi bunlar. Çaüdaş bilimsel araştırmalar, Galileo'nun fizik,
matematik ve astronomi araştırmalarından yararlanarak gelişmiştir. 1860'da
Gelileo, teleskopu bulmuş ve yıldızların haritasını çizmişti.
Pusulanın
geliştirilmesi ile gerçek kuzey (dünyanın fiziksel kuzeyi) ile manyetik kuzey
(dünyanın manyetik gücünden dolayı pusulaların döndüğü yer) arasındaki fark
belirlendi.
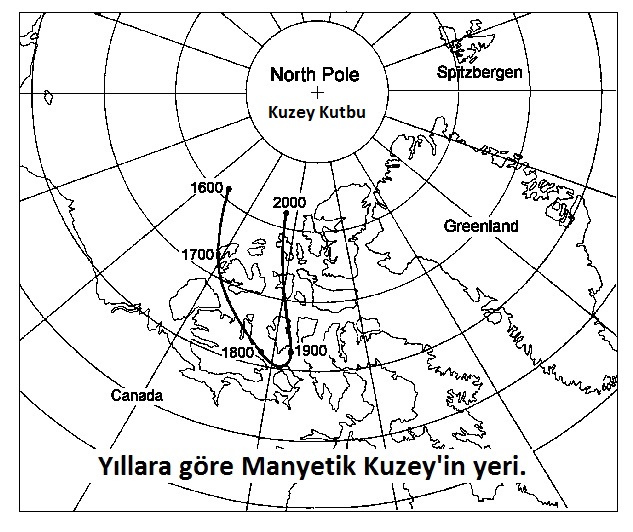
Bu iki
nokta, aslında coğrafik olarak yakın olmakla birlikte aynı yerde değildirler.
Üstelik gerçek kuzey her zaman aynı yerde olduğu halde manyetik kuzey, dünya
üzerindeki manyetik kuvvetlerin etkisi ile yavaş yavaş kaymaktadır.
II. dünya
savaşı ile geliştirilen elektronik teknolojisi, seyrüsefere yeni boyutlar
kazandırdı. Radyo, anında meteorolojik bilgi ve seyrüsefer planlamasında
kullanılmak üzere monte edildi. Gemi havadan karaya muhabere geliştirildi,
radyo yön bulucuları, sonar, LORAN (long range navigation..) gibi…
Uzun yol
seyrüsefer aygıtları, artık denizci ve havacılara, yüzlerce mil öteden
yerlerini tam olarak saptama olanakları getirmişti. Uçaklardaki ilk seyrüsefer
yardımcılarından biri olan radyo alıcıları, 1927’de servise konan (R/R Radio
Range) Uzun Bacaklı yayın istasyonları ile yön bulup çizilmesi için
kullanılırdı. Dört anteni olan bu vericiler, aynı anda yaptıkları yayın sonucu,
birbirleri ile girişim yaparlar ve bu girişimler ana yönlerde birer vınlama
olarak duyulurdu. Bu vınlamalardan herhangi birini yakalayan uçak, bu vınlamayı
devamlı izleyerek istasyonun üzerine varabilirdi.
Bir başka
seyrüsefer yardımcısı ise ADF (Automatic Direction Finder) Otomatik Yön bulma
cihazıdır. ADF, el ile ayarlanan radyo alıcısıdır ki; anteni ile yerdeki radyo
vericisinin yayınlarını yakalar. Tıpkı evlerimizdeki radyolar gibi, yayını en
iyi şekilde yakalamak için anten, uçakların alt kısmına konur. Antene enerji
verip istenen istasyon bulunduğunda, anten hemen ayarlandığı frekansta yayın
yapan vericiye döner. İşte bu özellik, daha sonra otomatik TV antenlerine de
uygulanmıştır. Uçakta ise, yuvarlak sigara tablası büyüklüğünde ve içi 360° olarak işaretlenmiş kadran üzerinde dönen ok
sayesinde, verici istasyonun yeri gözle, vericinin yayını da ses olarak
işitilebilir ve görülür.
VOR (Very High Frequency Omni Directional Range) çok yüksek frekanslı, çok yönlü yayın cihazı, günümüzde en
çok kullanılan, temel seyrüsefer cihazlarının başında gelir. Hava yollarının
saptanmasında kullanıldığından, en çok 370 Km’de bir yerleştirilirler. Aynı
anda iki yayın yaparlar ve yayınlar çok yüksek frekanslı olduklarından kötü
hava şartlarından etkilenmezler. Biri çok yönlü, ses dalgaları gibi daireler
halinde yayınlanır, ikincisi ise bir deniz feneri gibi kuzeyden başlayarak,
kendi etrafında dönerek yayınını sürdürür. Bu dönüş sırasında bir saniye
içerisinde 30 kez kuzeyden geçer ve bu geçiş sırasında şu iki olay meydana
gelir. 360 (kuzeyden itibaren bu sinyalin uçağa erişme zamanını alıcının
ölçmesi, ölçülen bu zamanın derece cinsinden kabindeki göstergede belirmesi.
İşte bu işlem tamamlanınca pilot, o istasyona hangi yönden yaklaşmakta olduğunu
derece olarak bilir.
Başarılı
bir seyrüsefer, nokta-nokta yol boyu, nerede olduğunu bilmekle başlar. DME
(Distance Measuring Equipment) Mesafe ölçen Alet, işte bu görevi üstlenmiştir.
Genellikle VOR cihazları ile aynı yere konurlar. DME, vericiye olan doğrudan
uzaklığı gösterir. Uçaktaki dijital gösterge, mil cinsinden sürekli bu mesafeyi
ölçer.
Saatte 600
nm (deniz mili) gibi gerçekçi bir hızla gittiğinizi düşünün. Dijital gösterge
dakikada 10nm gidildiğinden, her 6 saniyede 1 mil atacaktır. Sistemin esası
şudur. DME, uçaktan yerdeki cihaza bir sinyal gönderir. Yer istasyonu bu
sinyali alır, işler ve gerisin geriye gönderir. Bir cins ping-pong topu gibi,
uçak ile yer istasyonu arasındaki yayın alış-verişi ve bu sinyaller ışık hızına
yakın seyreder. İlk sinyal atıldığında DME, bu gidiş-geliz süresini ölçer.
Sinyalin hızını bildiği için aradan geçen süre, otomatik olaral mesafeye
çevrilir. Aynı yer istasyonuna, birkaç uçağın sinyal gönderdiğini düşünelim.
DME yer istasyonu, bunu da kaldırabilecek güçtedir. Aynı anda bir çok sinyal
alıp, doğru bilgiyi doğru uçağa gönderebilecek kapasitededir.
INS
(Inertial Navigation System) Süredurum Seyrüsefer Sistemi, tek bir aletin rota,
yer sürati, ivme ve yöne göre pozisyon değerlendirme metodudur. Tamamiyle kendi
kendine çalışan, ne yer ne de (Celestial Assistance) Yıldızlarla Yön Bulma
işlemine bağımlı değildir. Sistemin gereksinimi yalnızca Greenwich 0 meridyeni,
dünyada zaman biriminin esası olduğu için, bilgisayarın yararlanacağı paralel
(Kuzy/Güney yarıküresine göre derece olarak) ve meridyen (doğu/batı Greenwich’e
göre derece olarak) değerlerdir.
Bu
yüzyılın başlarında, Alman bilim adamı Maximillian Schuler deniz araçlarındaki
jiroskop hatalarını gidermek amacıyla parlak bir buluş geliştirdi. Zamanla bu
buluş, kolaylıkla uçaklara da uygulandı. Schuler’in fikri, ivmeölçer ya da hız
sezicileri, bir saatin sarkacı olarak kullanmaktı.
Sarkaç,
bir yerinden asılır ve öbür ucundaki ağırlıkla, yerçekimi ve diğer kuvvetler
ile yarım yay çizerek sallanır. Sarkaçların uzunlukları birkaç santimden birkaç
metreye kadar değişebilir. Schuler ise, dünyanın yarıçapı uzunluğunda bir
sarkaç istiyordu. Neden bu kadar uzun bir sarkaç? Çünkü bu uzun sarkacın
uzunlukla oranlı salınımı, her salınımdaki dönüm noktası ile salınımdaki
hataları “en az” a indirecek ve salınım sırasında yok edebilecek özelliğe
sahipti. Schuler, sarkaçlar da dahil, her şeyin bir CG ağırlık merkezine sahip
olduğunu biliyordu. Ayrıca, denge noktası ve ağırlık merkezi arasındaki
mesafeyi ayarlayanın, sarkacın uzunluğunu, dolayısı ile salınım fazını ve
zamanını da ayarlamış olacağını bilmekteydi. O zaman 7334km’lik bir sarkaç
yapabilir miydi? Evet; en azından matematik ile. Basit matematik ile
bilgisayarı programlar isek platform, dünyanın yarıçapına eşit uzunlukta bir
sarkaca sahip olduğuna inanacaktı. Aynı matematikçiler, ivmeölçerleri de bu sarkacın
ağırlık merkezinde olduklarına inandırdılar. Bu serbest yüzen kütle içindeki
dönme oranı 84.4 dakikadır. Bu saniyenin 1/200’ininde bir pozisyon
değerlendirme oranıdır.
INS üç
bölümden oluşur. Birincisi Jiroskop dengeleyici Platformdur ki ivme seziciler
buradaır. Bu ivme seziciler, ileri geri ve/ya da sağ sol hareketleri ölçerler.
İkincisi bilgisayar dır. Bilgisayar hız, mesafe ve yön/rota süzer seziciler.
Üçüncüsü ise, kabinde (cockpit) olan kontrol gösterge bölümünün, dijital bir
hesap makinesi göstergesine, kontrol bölümünü de, çağdaş dokunmatik alfa
numerik telefona benzetebiliriz. Gösterge, pilotun verdiği bilgiyi ve sonraki
gelişmeleri izleme olanağı sağlar.
İşlerliğini
yapabilmeleri için ivmeölçerlerin tümüyle dengede olmaları gerekir. Bu da denge
platformunun görevidir. Sabit bir seviye pozisyonu, oldukça yüklü bilgisayar
işlemi gerektirir. Örnek olarak, jiroskopların uzay referanslı olduklarını
biliriz. Biz bunların, yer kürede yaşadığımız için dünya referanslı olmalarını
da isteriz. Hepimiz biliyoruz ki, dünyamız tam yuvarlak değildir. Bu gerçek
(dünyanın dönüş hızını da katarak) bilgisayarın, platforma birçok hata ve
değişkenlerin kaydını da gerektirir.
Uçağın
ivmesi elektronik cihazlarla ölçülür. Uçak ileriye hareket ettiğinde, iç zar
geriye doğru gitmek ister. Aslında elektrik akımı, her hangi bir harekette iç
zarı yerinde tutar ama rezistans, zarı yerinde tutmak için harcadığı gücü, ivme
olarak sisteme iletir. Kalkış öncesi hazırlığında sisteme enlem-boylam
cinsinden değerler girilir. Alfa numerik tuşlarla bu çok kolaydır. Bir defa
koordinatlar göstergede yazıldığında “kabul” düğmesine basarak 15 dakika
beklememiz gerekecektir ki, jiroskoplar dönüş hızına erişsin ve platform
dengelensin. Artık bilgisayar tam olarak nerede olduğunu bilmektedir. Uçuş
planı da eklenince, nereye gideceğini de bilecektir. Belirli noktalara geldikçe
INS uyarı yapar. Bilgisayar da işlemleri oto pilota iletir. Oto pilot da bu
verilere göre gerekli yön değişikliklerini uygular.
Tüm yol
boyu seyrüsefer aletlerini kullanarak hedefe yaklaştığımızı ama bulutlardan
alanı göremediğimizi düşünelim. Bu durumda ILS (Instrument Landing System)
Aletle Alçalma Sistemi devreye girer. İki vericiden oluşan bu sistemde
vericilerden biri inilecek pistin sağında az içeriye, ikincisi pist sonundan az
öteye konur. Biri süzülüş açısı diğeri de pist ortalayıcı olarak hizmet verir.
Bu sinyaller, uçaktaki ILS aleti ile gözle izlenir. Bu sistemin gelişmişleri,
uçağı otomatik olarak piste indirir.
Bundan
seneler önce Charles Lindberg, bu araçların acaba kaçını kullanmıştı?
Kaynak: Bilim ve Teknik Ocak 1982 sayısı.
Hikaye
gibi geldi okuyunca seneler sonra.
Bu
bilgiler o zamana göre çok önemli bilgilerdi. Şimdi herkes her şeyi biliyor.
Güzel bir
nostalji.
151213